Welcome to my blog!
It's a home for my pet projects and some useful findings.-
Custom button in WPF using Paths
Default buttons in WPF have a nice look, but quite a lot of really useful features are missing. For example, the shape of the button, embedded images and so on. In my case the button had to be arrow-shaped and (what is more important) to be clickable only inside of the arrow, therefore I decided to use
Pathelements inside of the button. Fortunately the solution I came up with is quite flexible and you can use any elements as a button content: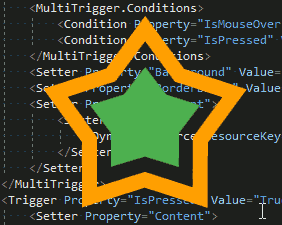
Figure 1. A button can be quite complex
-
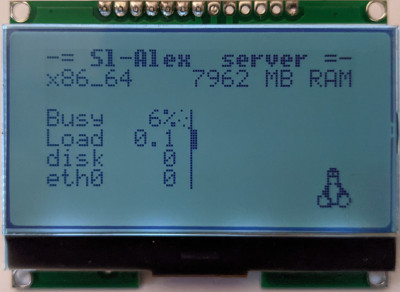
Simple USB LCD based on STM32F103 "blue pill"
A small LCD attached to the USB port can be very useful. It can show CPU load, RAM usage, network traffic and so on. Anything you could ever imagine on the separate small display - what could be better? Another good thing is that it is really inexpensive. All you need is a well-known STM32F103 board called “blue pill”, ST7565R-based LCD, several wires and a bit of time.
-
Finanzierungsrechner
A simple German financing calculator, all calculations are serverless, pure JS. Uses Chartist JS library for diagrams and Moment.js for datetime manipulations. See the source code here
DISCLAIMER: It works for me, but it does not mean it is 100% reliable. Use it at your own risk!
-
Complex hierarchy in OpenSCAD
It is nearly impossible to build a complex OpenSCAD hierarchy without working with children. Children are very useful when it goes about aligning children in the “mother” part. There are however several things, which are missing. For example, look at this spindle holder:
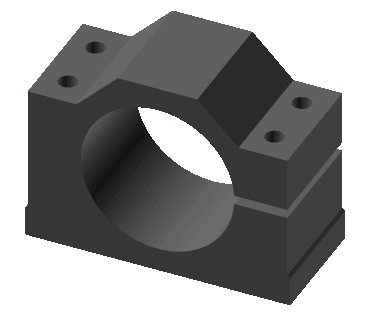
It has several mounting holes and a bracket for a spindle motor, so when you mount it on some surface you will need the following:
- Create mounting holes in the surface
- Align the spindle with the bracket and all screws with their mounting holes
-
IRMP mini - a small STM32 USB IR receiver
Many people are using wireless 2.4GHz remote controls to control their media PCs. These remote controls usually look like a normal keyboard and quite often have a built-in touchpad or accelerometer. They are quite small and useful, but it’s still an additional thing laying somewhere around. In my opinion, there is nothing better than the traditional universal IR remote control. One device “to rule them all”. Only one thing is missing: the IR receiver.
-
Dealing with complex OpenSCAD projects
When I just started to develop my first complex OpenSCAD project I didn’t think about the model hierarchy, I just created a lot of parts and added them all into a single assembly file. Soon I realized that this approach was completely wrong as it was nearly impossible to navigate in such an assembly, just imagine this approach with the following design:
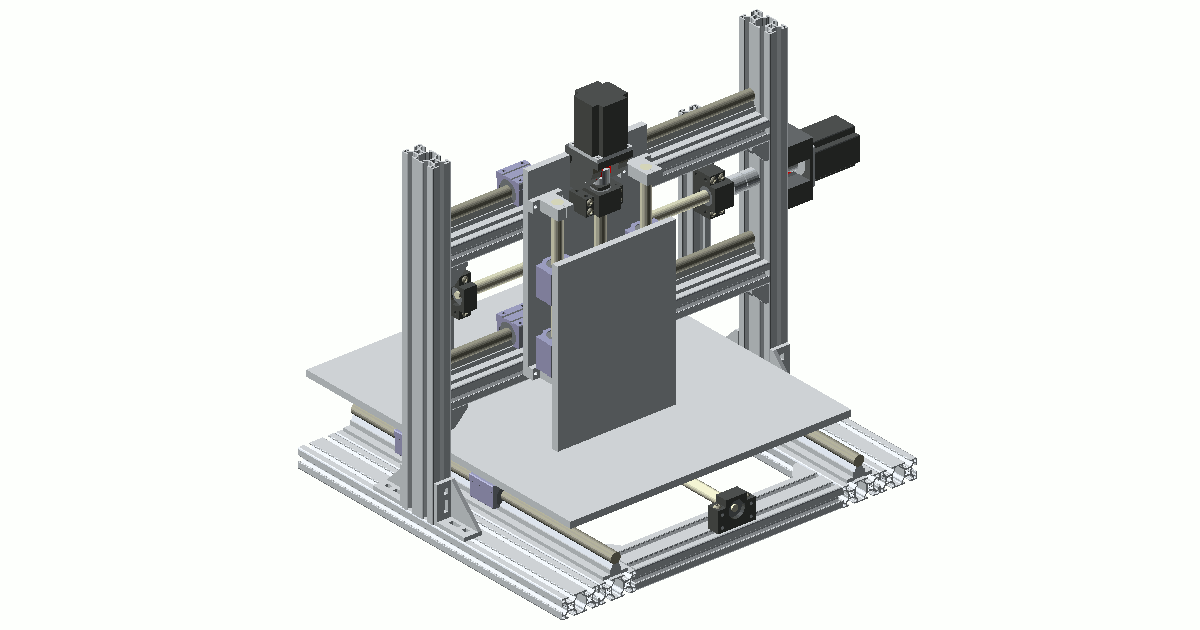
Sample complex assembly: CNC design draft Adding a new part and moving it to the desired location turned into a nightmare and I started to think about an easy and maintainable way to solve this problem and now I think I found the right solution.
- Whiteboard Image Extractor (Python)
- Sharp Memory LCD in Home Assistant with ESPHome
- Automatic update of IPv6 dynamiс DNS record in Home Assistant
- ARM TZ universal secure call wrapper
- ShortcutEdit - capturing shortcuts in PyQt
- GrblHal breakout for black pill
- WT32-SC01 USB C power fix
- Black pill F4xx 3D model
- HD44780 and WS0010: universal initialization
- RPM meter